




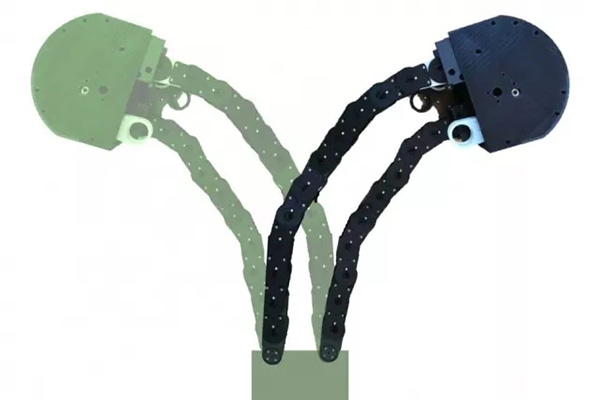
这种新型“生长型机器人”可以程序性地向不同方向进行生长并延伸:通过“生长点”或变齿轮箱传送,将链条间的各元件进行锁定和推动,完成其伸展过程。 (图片来源:课题研究员,麻省理工新闻部编辑)
在今天的工厂和仓库中,机器人呼啸而过的身影随处可见,将物品或工具从一个站点运送到另一个站点。在大多数情况下,机器人可以在开放式布局中轻松地完成行进路线。但在狭窄的空间中面对一些任务时,则要困难得多,例如从杂乱的货架后获取物品,或者将汽车引擎内的油盖拧开。
目前,麻省理工学院(MIT)的工程师们已经开发出一种机器人,实现了柔韧和坚实的结合:它可以延伸出一个链状的附肢,既能够足够灵活,根据需要进行弯曲和改变形状;又能够具有足够的刚性,承受沉重的负载,或施加扭矩在狭窄的空间中完成组装零件的任务。当一个任务完成后,机器人可以将附肢收回,并在下一个任务中,根据情况再次延伸出所需的长度和形状。
附肢的设计灵感来自于植物的生长方式。比如植物将营养物以液态的形式运输到植物顶端。在那里,它们被转化为固态,一点一点地形成支撑茎。
同样,机器人由“生长点”或齿轮箱组成,它将松散的链条收回,齿轮箱中的齿轮将链条各元件锁在一起,作为一个刚性附肢,逐段地伸展出去。
研究人员在近日举行的IEEE国际智能机器人与系统大会(IEEE International Conference on Intelligent Robots and Systems,IROS)上,展示了这款以植物为灵感的“生长机器人”。他们设想可以在机器人的齿轮箱上安装抓取器,摄像头和其他传感器,使其能够柔韧地穿过飞机的推进系统并拧紧松动的螺钉,或者在不影响周围库存摆放以及其他进行中的任务的情况下,取到货架上的物品。
麻省理工学院机械工程学教授Harry Asada说道:“想象一下汽车换油的情景,当你打开发动机顶盖后,所需的工具必须要足够灵活,可以穿过左右两边的急转弯到达机油滤清器,同时又要足够坚硬,可以拧开机油滤清器盖,将其卸下。”
负责这项工作的严同喜,曾是浅田实验室的研究生,他说道:“现在,我们有了一个有潜力完成这些任务的机器人,它可以生长、收缩,并根据周围环境,再次生长为不同的形状。”
该团队还包括麻省理工学院的研究生Emily Kamienski和访问学者Seiichi Teshigawara,他们在会议上展示了研究结果。

图片来源于研究论文
临门一脚
新机器人的设计是Asada在解决“最后一英尺问题”工作中的一个意外收获。“最后一英尺问题”是一个工程术语,是指机器人任务或探索性任务的最后一步或最后一英尺。虽然机器人可能大部分时间都穿梭在开放空间中,但其任务的最后一步可能涉及到它在更紧凑、更复杂的空间中是否有更加灵活的行动力和完成任务的能力。
工程师们已经针对最后一英尺问题设计了各种概念和原型,包括由柔软的气球状材料制成的机器人。这种材料可以像藤蔓一样“生长”,通过狭窄的缝隙。但是Asada表示,这种柔软的可伸缩机器人不够坚固,当机器人攀爬到目的地后,不足以支撑“末端执行器”或执行任务所必需的附加组件,例如抓取器,照相机和其他传感器。
福特基金会工程学教授Asada说:“我们的解决方案实际上并没用柔软的材料,而是巧妙地使用了刚性材料,让它具有柔韧性。”
链式连接
研究团队明确了应用这一植物生长特点的元素后,便试图在一个可扩展的机器人上模拟这个过程。Asada说:“机器人的实现过程与真实的植物完全不同,但它在某种抽象层面上展现了同样的功能。”

图片来源:Unsplash
研究人员设计了一个齿轮箱来代表机器人的“生长顶端”,类似于植物的顶芽,随着越来越多的营养涌向该部位,顶端将不断形成坚硬的茎。在齿轮箱中,它们安装了一个由齿轮和马达组成的系统,该系统用于拉动“液态物质”,也就是机器中由3D打印,相互连接的塑料元件所组成的柔韧链条,类似自行车链条。
当链条注入齿轮箱中,它会转动曲柄,曲柄通过第二套马达系统,将链条上的一部分元件与其相邻的元件锁在一起,在传送出齿轮箱的过程中形成了一段刚性的附肢。
研究人员可以对机器人进行编程,将特定的元件锁定在一起,而其他元件则保持解锁状态,以形成特定的形状,或朝某些特定方向“生长”。在实验中,他们能够对机器人进行编程,使其在“生长”或延伸过程中绕过障碍物。
严指出:“它可以锁定不同位置的元件,以实现各种程度的弯曲,并具有广泛的运动范围。”
当链条被锁定并且是刚性状态时,它的强度足以支撑一磅重的物体。研究人员表示,如果将抓取器连接到机器人的生长顶端或齿轮箱上,那么机器人将可以延伸至一定程度,灵活地穿过狭窄的空间,然后施加足够的扭矩旋松一个螺栓或拧开一个盖子。
Kamienski认为,自动化汽车维修,是机器人可以协助完成的一个很好的例子:“引擎盖下方的空间虽然相对开阔,但最后一步,必须要绕过引擎部分才能到达机油滤清器,这是固定机器手臂无法到达的角度,而类似这样的任务,‘生长型机器人’可以助人一臂之力。”
作者:Jennifer Chu
翻译:王嘉媛
审校/编辑:李光昭
引进来源:MIT News

















